
La théorie des graphes est un domaine des mathématiques et de l’informatique qui vise à représenter divers problèmes de la vie réelle sous forme de graphes. Une application courante consiste à modéliser un réseau routier reliant différentes villes. L’un des principaux enjeux est l’optimisation des distances entre deux points. Pour résoudre ce problème, on utilise l’algorithme de Dijkstra. Prononcé approximativement « Dextra », l’algorithme de Dijkstra est utilisé pour trouver le chemin le plus court entre deux sommets d’un graphe, qu’il soit orienté ou non orienté. Tu es actuellement en cursus scientifique et tu souhaites en savoir plus sur cet algorithme ? Pas de panique, Études Tech t’explique tout ce qu’il faut savoir sur l’algorithme de Dijkstra et comment déterminer le plus court chemin entre deux sommets de manière simple et rapide.
Quel est le principe de l’algorithme de Dijkstra ?
L’algorithme de Dijkstra est un algorithme de recherche de chemin le plus court dans un graphe pondéré, c’est-à-dire un réseau de nœuds connectés par des arêtes ayant des poids ou des coûts associés. L’algorithme détermine le chemin le plus court entre un nœud de départ et tous les autres nœuds du graphe.
Cet algorithme utilise une approche gloutonne pour trouver le chemin optimal. Il attribue initialement une distance infinie à tous les nœuds, sauf au nœud de départ qui a une distance de 0. Ensuite, à chaque itération, l’algorithme sélectionne le nœud non visité avec la distance la plus faible, appelé le « nœud courant ». Il met à jour les distances des nœuds voisins en les comparant à la distance actuelle du nœud courant, plus le poids de l’arête les reliant. Si la nouvelle distance est plus petite, elle est mise à jour. L’algorithme répète ce processus jusqu’à ce que tous les nœuds aient été visités ou que la distance minimale vers le nœud d’arrivée soit trouvée.
L’algorithme de Dijkstra garantit de trouver le chemin le plus court dans un graphe sans arêtes de poids négatif, mais peut ne fonctionner correctement si de tels poids sont présents. Il est largement utilisé dans les applications de routage dans les réseaux de télécommunications, la planification de trajets dans les systèmes de transport et d’autres domaines où la recherche de chemins optimaux est nécessaire.
Comment remplir le tableau de Dijkstra ?
Pour remplir le tableau de Dijkstra, il est important de suivre les étapes suivantes. Tout d’abord, il faut initialiser le tableau avec les valeurs appropriées :
– La distance du nœud de départ est de 0 ;
– La distance des autres nœuds est initialement infinie ou une valeur très élevée pour représenter l’infini ;
– Le nœud de départ n’a pas de nœud précédent.
Ensuite, il faut marquer tous les nœuds comme non visités. Puis, répéter les étapes suivantes jusqu’à ce que tous les nœuds aient été visités :
– Sélectionner le nœud non visité avec la plus petite distance. Cela peut être fait en parcourant le tableau et en recherchant le nœud avec la plus petite distance non visitée ;
– Marquer ce nœud comme visité ;
– Mettre à jour les distances des nœuds voisins non visités. Ici, il faut calculer la distance temporaire en ajoutant la distance actuelle du nœud sélectionné à la distance de l’arête qui relie ce nœud à un nœud voisin. Si la distance temporaire est plus petite que la distance actuelle du nœud voisin, mettez à jour sa distance avec la distance temporaire et mettez le nœud sélectionné comme son nœud précédent.
Une fois que tous les nœuds ont été visités ou que la distance minimale vers le nœud d’arrivée a été trouvée, le tableau de Dijkstra est rempli et il est désormais possible d’utiliser pour déterminer le chemin le plus court en suivant les nœuds précédents à partir du nœud d’arrivée jusqu’au nœud de départ.
Comment détecter un circuit absorbant dans le graphe ?
Pour détecter un circuit absorbant dans un graphe, on peut utiliser l’algorithme de détection de cycles. Les étapes générales consistent à parcourir chaque nœud du graphe et à effectuer une recherche en profondeur (DFS) ou en largeur (BFS) à partir de chaque nœud. Pendant la recherche, il est important de garder une trace des nœuds visités et des arêtes empruntées. Si, lors de la recherche, on revient à un nœud déjà visité en empruntant une arête différente de celle par laquelle on est arrivé, cela indique la présence d’un circuit absorbant. Il est à noter que pour détecter un circuit absorbant, il doit y avoir un cycle dans le graphe où la somme des poids des arêtes est négative. Si toutes les arêtes ont des poids positifs ou nuls, il n’y aura pas de circuit absorbant. En cas de détection d’un circuit absorbant, il est possible d’obtenir des informations supplémentaires sur le circuit en suivant les arêtes du cycle à partir du nœud où le cycle a été détecté. Toutefois, il est important de noter que la détection des circuits absorbants peut être coûteuse en termes de temps de calcul, en particulier pour les graphes de grande taille. C’est pourquoi des algorithmes plus efficaces, comme l’algorithme de Bellman-Ford, sont généralement utilisés pour détecter les circuits absorbants dans les graphes pondérés.
Qui est Edsger Dijkstra ?
Monsieur Edsger Dijkstra était un informaticien néerlandais considéré comme l’un des pionniers de l’informatique et de la science informatique théorique. Né le 11 mai 1930 à Rotterdam, aux Pays-Bas, il décède le 6 août 2002. Dijkstra est réputé pour avoir réalisé de nombreuses contributions significatives dans le domaine de l’informatique. Il est surtout connu pour avoir développé l’algorithme de Dijkstra, également appelé l’algorithme de recherche du plus court chemin, qui est largement utilisé dans la résolution de problèmes d’optimisation des chemins dans les réseaux informatiques et les systèmes de transport.
Il a également joué un rôle majeur dans le développement de la programmation structurée, en proposant des concepts tels que les structures de contrôle conditionnelles (if-then-else) et les boucles (for, while) pour améliorer la lisibilité et la fiabilité des programmes informatiques.
Edsger Dijkstra a reçu de nombreuses distinctions au cours de sa carrière, dont le prix Turing en 1972, considéré comme l’équivalent du prix Nobel en informatique. Il a également été professeur d’informatique à l’université de technologie d’Eindhoven et a travaillé dans diverses institutions académiques et de recherche. Comme tu l’as compris, sa contribution à la science informatique et son influence sur le domaine sont largement reconnues, ce qui fait de lui l’un des esprits les plus brillants de l’informatique moderne.
Pourquoi utiliser Dijkstra ?
L’algorithme de Dijkstra est largement utilisé pour trouver le chemin le plus court dans un graphe pondéré, particulièrement lorsque les poids des arêtes correspondent à des distances réelles. Plusieurs raisons justifient son utilisation. Tout d’abord, l’algorithme de Dijkstra est relativement efficace, avec une complexité temporelle de l’ordre de O((|V| + |E|) log |V|), où |V| représente le nombre de nœuds et |E| le nombre d’arêtes du graphe. Cette complexité est raisonnable même pour des graphes de grande taille.
L’algorithme de Dijkstra garantit la découverte du chemin le plus court entre un nœud de départ et tous les autres nœuds accessibles du graphe. Il est donc adapté aux problèmes où l’on cherche une solution optimale en termes de distance. Il est spécifiquement conçu pour les graphes pondérés, où les arêtes sont associées à des poids ou des coûts. Ainsi, il convient lorsque les distances entre les nœuds représentent des valeurs réelles, comme des distances physiques ou des coûts de parcours.
Celui-ci fonctionne correctement lorsque les poids des arêtes sont positifs ou nuls. En revanche, il n’est pas directement applicable lorsque des poids négatifs sont présents dans le graphe. Dans de tels cas, des variantes de Dijkstra, telles que l’algorithme de Bellman-Ford, sont préférables.
Enfin, il offre une simplicité d’implémentation dans le sens où il est relativement simple à comprendre et à mettre en œuvre. Cela en fait un choix pratique pour des applications courantes où la simplicité est privilégiée. Il est important de noter que le choix de l’algorithme dépend des caractéristiques spécifiques du problème et du graphe. Il est essentiel d’évaluer les contraintes, les performances et les exigences particulières afin de sélectionner l’algorithme le mieux adapté.
Calculer le chemin le plus court : Un exemple concret
Considérons le graphe pondéré suivant :
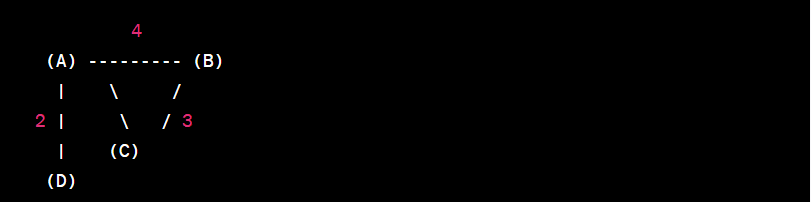
Ici, il faut trouver le chemin le plus court entre le nœud A et tous les autres nœuds en utilisant l’algorithme de Dijkstra. Voici la résolution à cet exercice étape par étape.
– Initialisation :
Définir la distance initiale de A à 0 et des autres nœuds à l’infini ;
Marquer tous les nœuds comme non visités.
– Étapes de mise à jour :
Sélectionner le nœud non visité avec la distance la plus faible (dans ce cas, A avec une distance de 0) ;
Explorer les nœuds adjacents à A (B et D) et mettre à jour leurs distances si une distance plus courte est trouvée ;
La distance de B devient 4 (0 + 4) ;
La distance de D devient 2 (0 + 2) ;
Marquer A comme visité.
– Répéter les étapes de mise à jour pour les nœuds adjacents :
Sélectionner le nœud non visité avec la distance la plus faible (dans ce cas, D avec une distance de 2) ;
Explorer les nœuds adjacents à D (A et C) et mettre à jour leurs distances si une distance plus courte est trouvée ;
La distance de A reste 0 (distance déjà mise à jour) ;
La distance de C devient 5 (2 + 3) ;
Marquer D comme visité.
– Répéter les étapes de mise à jour pour les nœuds adjacents :
Sélectionner le nœud non visité avec la distance la plus faible (ici, B avec une distance de 4) ;
Explorer le nœud adjacent à B (C) et mettre à jour sa distance si une distance plus courte est trouvée ;
La distance de C reste 5 (distance déjà mise à jour). Marquer B comme visité.
– Répéter les étapes de mise à jour pour les nœuds adjacents :
Sélectionner le nœud non visité avec la distance la plus faible (dans ce cas, C avec une distance de 5) ;
Il n’y a plus de nœuds adjacents non visités.
– Fin de l’algorithme. Les distances les plus courtes depuis A vers tous les autres nœuds sont :
A vers B : distance de 4.
A vers C : distance de 5.
A vers D : distance de 2.
Le chemin le plus court de A à chaque nœud est donc :
– A -> D avec une distance de 2.
– A -> B avec une distance de 4.
– A -> C avec une distance de 5.
Dijkstra : Quelles alternatives à l’algorithme ?
Il existe divers autres algorithmes qui résolvent le problème du plus court chemin. Cependant, il est essentiel de prendre en compte les conditions d’application spécifiques de ces différents algorithmes. Par exemple, l’algorithme de tri topologique est plus efficace que l’algorithme de Dijkstra, mais il ne peut être utilisé que sur des graphes acycliques, c’est-à-dire sans boucles.
La complexité de l’algorithme de Dijkstra est polynomiale. En notant n le nombre de sommets et a le nombre d’arêtes, sa complexité dans le pire des cas est de l’ordre de O(a + n log(n)). Edsger Dijkstra a découvert cet algorithme en seulement 20 minutes alors qu’il cherchait le meilleur itinéraire pour se rendre de Rotterdam à Groningen, confortablement installé à la terrasse d’un café. Cela démontre que les bonnes idées peuvent parfois surgir dans des moments simples et informels, comme une pause café.
Lire aussi : Guide complet pour apprendre JavaScript
Ce qu’il faut retenir de Dijkstra
Lorsque nous souhaitons trouver le chemin le plus court entre deux sommets d’un graphe, énumérer toutes les possibilités et calculer leurs longueurs peut devenir rapidement impossible, surtout avec un graphe de grande taille. Il est donc fortement encourager, voire primordial d’utiliser des algorithmes. En 1959, E. W. Dijkstra (1930-2002) a proposé un algorithme qui permet de déterminer le plus court chemin entre deux sommets d’un graphe connexe pondéré, qu’il soit orienté ou non, à condition que les poids des arêtes soient positifs. C’est pour cela qu’en terminale ES, les lycéens se concentrent sur un cas particulier où les arcs du graphe ont des poids réels positifs.
L’algorithme de Dijkstra repose sur le principe suivant : Si le chemin le plus court reliant le sommet de départ à un autre sommet S passe par les sommets A, B, …, N, alors les différentes étapes de construction de ce chemin sont également les plus courts chemins reliant A aux différents sommets B, C, …, N.
Progressivement, l’algorithme construit le chemin recherché en choisissant, à chaque itération, un sommet non traité du graphe pour lequel la longueur provisoire du chemin le plus court de A à ce sommet est minimale. L’algorithme comprend une phase d’initialisation. Chaque sommet se voit attribuer un poids initial de 0 pour le sommet de départ et une valeur infinie pour les autres sommets.
Lire aussi : Le guide complet pour apprendre Python
Les meilleures vidéos pour calculer le plus court chemin entre deux sommets
En plus de toutes ces explications, tu peux te tourner vers des vidéos explicatives pour comprendre comment calculer le plus court chemin entre deux sommets d’un graphe. Parmi les plus visionnées, on retrouve celle d’Yvan Monka qui comptabilise plus de 416 000 vues sur YouTube. Avec plus de six milles j’aime sur sa vidéo, le professeur de mathématiques fait l’unanimité grâce à ses explications claires et synthétiques.
La chaîne YouTube « À la découverte des graphes », elle, dispose de la seconde vidéo la plus regarder sur l’algorithme de Dijkstra. En neuf minutes de vidéo, il est clairement expliqué comment construire les plus corts chemins pondérés à partir d’un sommet.
Lire aussi : Tout savoir sur l’algorithme d’Euclide





